Cuádrica
En matemáticas, una cuádrica o superficie cuádrica es una generalización de la noción de cónica del plano a dimensiones superiores. Son superficies en el espacio o hipersuperficies (de dimensión ) en un espacio -dimensional definidas como el conjunto de ceros de un polinomio irreducible de grado dos en variables, es decir, por una ecuación de la forma


,

donde P es un polinomio de segundo grado en las coordenadas . Cuando el polinomio no es absolutamente irreducible, el conjunto de ceros no se suele considerar una cuádrica, o se denomina cuádrica degenerada o cuádrica reducible.

Cuando no se precisa, es una superficie del espacio tridimensional real usual, en un sistema de coordenadas ortogonal y unitario, y las coordenadas se llaman x, y, z.

Historia
Fueron los matemáticos griegos de la antigüedad quienes iniciaron el estudio de las cuádricas, con el cono (una cuádrica) y sus secciones, que son las cónicas, curvas en un plano bidimensional, aunque no emplearon ecuaciones.
Definición afín y métrica
Una cuádrica afín, o superficie cuádrica afín, es una hipersuperficie n-dimensional correspondiente al conjunto de ceros de un polinomio de grado dos. Las variables del polinomio representan coordenadas en el espacio afín, de forma que el conjunto de puntos de la cuádrica es el conjunto de puntos cuyas coordenadas en una referencia afín prefijada. Si estas coordenadas son , entonces la cuádrica típica en ese espacio se define mediante la ecuación algebraica:


donde es una matriz cuadrada de dimensión , es un vector de dimensión y es una constante. Si bien y son por lo general reales o complejos, una cuádrica puede definirse en general sobre cualquier anillo.





Cuádricas del espacio euclídeo
Ecuación cartesiana
Esta sección se centra en las cuádricas del espacio euclídeo real tridimensional. La ecuación cartesiana de una superficie cuádrica de este espacio es de la forma:
- ,
- donde y al menos uno de los coeficientes y es no nulo.




La definición algebraica de las cuádricas incluye casos degenerados que no se corresponden con la intuición geométrica que se tiene de ellas.
Por ejemplo, la ecuación:

es de segundo grado pero, también se puede escribir como:

que equivale a:
- ,

una ecuación de primer grado que corresponde a un plano, superficie que no tiene las propiedades relacionadas con el segundo grado. Generalmente, se descartan todos los polinomios de segundo grado que son cuadrados.
- A menudo, es útil recordar que si la ecuación en su forma cartesiana carece de términos cruzados, i.e., los coeficientes D, E y F son iguales a cero:

entonces los términos lineales para cada variable:

pueden asimilarse a los cuadráticos:

mediante el método de completar cuadrados, de modo que sea fácil interpretar la ecuación como una de las formas "normalizadas" que se presentan a continuación, pero "descentrada" o "trasladada" (no centrada en el origen, , sino en un punto de coordenadas implícitas en la nueva forma).

Ecuación normalizada
La ecuación normalizada de una cuádrica tridimensional, centrada en el origen (0, 0, 0) de un espacio tridimensional, es de la forma de una de las siguientes:




donde y para y .




El teorema del eje principal demuestra que, para cualquier cuádrica, existe un cambio de coordenadas cartesianas (o, equivalentemente, una transformación euclídea, es decir, que conserva las distancias) que permite que la ecuación de la cuádrica en la nueva referencia sea normalizada. Esta ecuación se llama normalizada porque dos cuádricas tienen la misma forma normalizada si y sólo si hay una transformación euclídea que transforma los puntos de una en los de la otra. Que dos cuádricas tengan la misma forma normalizada es una relación de equivalencia, lo que permite clasificarlas todas según cuál tienen, como se ve a continuación.
Clasificación afín y métrica de las cuádricas
Por medio de traslaciones y rotaciones (transformaciones euclídeas, es decir, que conservan la distancia) cualquier cuádrica se puede transformar en una que tiene su ecuación en forma normalizada, como se ha definido en el apartado anterior. En el espacio euclídeo real tridimensional una cuádrica queda pues totalmente determinada por los coeficientes de su forma normalizada.
Afínmente (es decir, ignorando la noción de distancia), las transformaciones que se pueden usar para transformar una cuádrica en otra son más amplias (no hace falta que conserven la distancia, sólo las alineaciones y razones simples) y por medio de homotecias podemos suponer que todos los coeficientes de las formas normalizadas son . Se obtienen así exactamente 17 opciones, aunque sólo nueve cuádricas "verdaderas": un cono y tres cilindros (llamados habitualmente cuádricas degeneradas) y cinco cuádricas no degeneradas (elipsoides, paraboloides e hiperboloides). El resto son las cuádricas imaginarias, que constan de puntos de coordenadas complejas, (elipsoide imaginario (sin ningún punto real), cilindro imaginario (sin ningún punto real) y cono imaginario (con un único punto real)) y las cuádricas reducibles, que pueden descomponerse en dos planos. De estas últimas hay cinco tipos, dependiendo de si los planos son distintos o no, paralelos o no, y reales o complejos.

La clasificación se muestra en la siguiente tabla:
| Cuádricas reales no degeneradas | ||
|---|---|---|
| Elipsoide |  | |
| Paraboloide elíptico |  | |
| Paraboloide hipérbolico |  | |
| Hiperboloide de una hoja o hiperboloide hiperbólico | 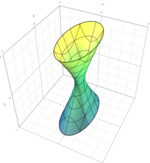 | |
| Hiperboloide de dos hojas o hiperboloide elíptico | 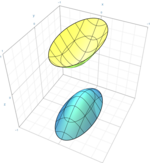 | |





| Cuádricas reales degeneradas | ||
|---|---|---|
| Cono elíptico |  | |
| Cilindro elíptico | 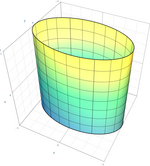 | |
| Cilindro hiperbólico |  | |
| Cilindro parabólico |  | |




Con una definición más general de cuádrica (una que permite considerarlas en un espacio proyectivo general), también existe una clasificación proyectiva en el espacio proyectivo real, donde dos cuádricas son equivalentes si existe una proyectividad entre ellas (una aplicación que respeta la estructura proyectiva). Estas transformaciones son menos restrictivas y muestran que el elipsoide, el hiperboloide de dos hojas y el paraboloide elíptico están de hecho relacionados, igual que el paraboloide hiperbólico y el hiperboloide de una hoja (por ser superficies regladas) y el cono y el cilindro (por ser cuádricas degeneradas). En el espacio proyectivo complejo todas las cuádricas no degeneradas resultan indistinguibles entre sí.
Definición proyectiva
Dado un espacio proyectivo sobre un espacio vectorial sobre un cuerpo o , una cuádrica de se define como un elemento de , esto es, una forma bilineal simétrica no nula definida salvo producto por escalar no nulo. Es decir, es una cuádrica de si la clase de equivalencia de forma bilineal simétrica respecto de la relación de equivalencia . Nótese que como hay una biyección entre formas bilineales simétricas y formas cuadráticas (ver este último artículo), sería equivalente definir una cuádrica como , con forma cuadrática con la misma relación de equivalencia.





![{\displaystyle Q=[\varphi ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c3ddfb591932d5487dfd29c416c7bb420b33a035)


![{\displaystyle Q=[q]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/85451277170e81d38ddd6b8d7cfd42cfb080cd3c)

Conjunto de puntos de la cuádrica
Definimos ahora los puntos de como aquellos tales que (es decir, el conjunto de puntos con un representante que anula la forma cuadrática asociada a ). Denotaremos el conjunto de puntos de una cuádrica como .
![{\displaystyle p=[v]\in \mathbb {P} }](https://wikimedia.org/api/rest_v1/media/math/render/svg/c4e121f9163e7b4e798c33c20b41fa5179d7c330)



| está bien definido. |
| En la definición de punto de una cuádrica hemos tomado representantes tanto del punto como de la cuádrica. Tenemos que ver que la condición de la definición () es independiente de la elección de estos. Sean representantes de respectivamente y otros representantes. Entonces,
si y sólo si , por lo que está bien definido. |






Es importante notar que hemos definido una cuádrica como un elemento de , y no como su conjunto de puntos, pues puede haber cuádricas con el mismo conjunto de puntos que sean distintas. Por ejemplo, en , podemos tomar las formas cuadráticas de que en la base canónica (por ejemplo) tienen la siguiente forma: . Las dos cuádricas son distintas (toman valores distintos en , por ejemplo), por lo que las cuádricas definidas por sus formas bilineales simétricas asociadas son iguales. Sin embargo, tienen el mismo conjunto de puntos (vacío):.





![{\displaystyle Q_{1}=[\varphi _{1}],Q_{2}=[\varphi _{2}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/bcbe7ca89b61e243a571060049d82bbd6aa64fee)
![{\displaystyle \vert Q_{1}\vert =\{p=[(x,y)]\in \mathbb {P} :x^{2}+y^{2}=0\}=\emptyset =\{p=[(x,y)]\in \mathbb {P} :x^{2}+2y^{2}=0\}=\vert Q_{2}\vert }](https://wikimedia.org/api/rest_v1/media/math/render/svg/80e4e9da76f7fa274872c2734cbdf3c45fa6ce83)
Matriz de una cuádrica en una referencia
Dada una cuádrica de y una referencia proyectiva con base adaptada (ver referencia proyectiva), definimos la matriz de en referencia a la matriz definida salvo producto por escalar siguiente:


,
![{\displaystyle M_{\Delta }(Q)=[M_{e}(\varphi )]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7452aa29b9243a0ff6bf75f3efaee4c405f1f46b)
con la matriz asociada a en base (ver Forma bilineal § Matriz asociada).

Un punto pertenece a si y sólo si , con el vector de componentes de en base , sea cual sea :
![{\displaystyle p=[x]\in \mathbb {P} }](https://wikimedia.org/api/rest_v1/media/math/render/svg/ff3f137b0a33b894e65bff99bac8383c41627ada)




.
![{\displaystyle p=[x]\in \vert Q\vert \Leftrightarrow \varphi (x,x)=0\Leftrightarrow X^{\mathsf {T}}M_{e}(\varphi )X=0\Leftrightarrow X^{\mathsf {T}}\lambda M_{e}(\varphi )X=0}](https://wikimedia.org/api/rest_v1/media/math/render/svg/42a0b31de899377304b45d3a22f4d67fd5ae8995)
Por tanto, la matriz de en referencia nos da una herramienta para trabajar con en coordenadas respecto a : tenemos una ecuación que satisface cualquier tupla de coordenadas homogéneas de un punto de .
Imagen de una cuádrica por una proyectividad
Supongamos que tenemos dos espacios proyectivos definidos sobre espacios vectoriales sobre un mismo cuerpo y una proyectividad . Dada una cuádrica de queremos definir una cuádrica de que se pueda interpretar como su imagen por . Como una cuádrica no es un conjunto de puntos, no podemos definir la imagen de como se suele hacer para conjuntos (tomando el conjunto de imágenes del conjunto original).



![{\displaystyle f=[\alpha ]\colon \mathbb {P} \rightarrow \mathbb {P} '}](https://wikimedia.org/api/rest_v1/media/math/render/svg/963e93fa739cfea36a20ecd5f93c7ceaa5fdf23b)



Lo que se hace en este caso es observar que, como es una forma bilineal simétrica y es un isomorfismo (una aplicación lineal biyectiva), la aplicación definida como es una forma bilineal simétrica de . Entonces, definimos la imagen de por como la cuádrica .




![{\displaystyle f=[\alpha ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/91070b1c7aa9a7703fb5bd544f9acc3a7f987d22)
![{\displaystyle f(Q):=[\psi ]=[\varphi \circ (\alpha ^{-1}\times \alpha ^{-1})]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/43582f569b0d9e82c15cdaa30be784fd33b0d83e)
Observamos que esta definición respeta la definición de imagen de un conjunto cuando observamos la imagen de :
| Basta aplicar las definiciones observando que por definición de tenemos que :
|



![{\displaystyle p=[x]\in \vert Q\vert \Leftrightarrow \varphi (x,x)=0\Leftrightarrow \psi (\alpha (x),\alpha (x))=0\Leftrightarrow [\alpha (x)]\in \vert [\psi ]\vert \Leftrightarrow f(p)\in \vert f(Q)\vert \quad \square }](https://wikimedia.org/api/rest_v1/media/math/render/svg/9307dcaf56a628223a390ad56728b5bc659de83d)
Vemos cómo se comportan las matrices de las cuádricas respecto de la toma de imágenes.
| Sean referencias proyectivas de con bases adaptadas , respectivamente. Entonces,
|
| Basta ver que . Escribimos , por lo que . Lo que tenemos que ver se traduce entonces a que . Sean . Sean las coordenadas de cada uno en bases . Tenemos que . Ahora, , y esto para cualquier par . Tomando los vectores de la base canónica obtenemos de lo anterior que los elementos de la matriz son los mismos que los de la matriz , que es lo que queríamos. |















Es sencillo comprobar que la imagen por una proyectividad de los puntos de una referencia proyectiva vuelven a ser una referencia proyectiva y que la imagen de la base adaptada es base adaptada de la referencia imagen. Sabiendo esto, el enunciado siguiente está bien definido:
| Sean una proyectividad, una referencia proyectiva con base adaptada. Entonces, |
| Es inmediato a partir de y de que |




Clasificación de cuádricas
Se dice que dos cuádricas de un mismo espacio proyectivo son equivalentes () si existe una proyectividad que transforma una en la otra. Es decir, . Se puede ver que esto es una relación de equivalencia. Por el resultado del apartado anterior, esto es equivalente a que existan dos referencias proyectivas en que las dos cuádricas tengan la misma matriz, es decir, que existan tales que .
![{\displaystyle Q=[\varphi ],Q'=[\varphi ']}](https://wikimedia.org/api/rest_v1/media/math/render/svg/06d3d0ac294e52f3efaa0e843d502f06f165a3fa)



Como estas matrices son matrices de formas cuadráticas (no nulas salvo producto por escalar no nulo), si nos centramos en los casos o , podemos remitirnos a la clasificación de estas (ver Forma cuadrática § Equivalencia de formas cuadráticas) para clasificar las cuádricas.
A continuación se describen las clasificaciones de las cuádricas en los planos y espacios proyectivos reales y complejos, es decir, se da una lista cerrada de cuádricas tal que cualquier otra cuádrica se puede transformar en una y sólo una de la lista por proyectividades.
Clasificación de cónicas en el plano proyectivo complejo
Sabemos que toda matriz de una forma cuadrática compleja es equivalente a una y sólo una matriz diagonal de la forma , con , la dimensión del espacio vectorial . Al proyectivizar estas matrices, no consideramos la matriz nula y consideramos equivalentes las matrices que difieran sólo en el producto por un escalar. Por tanto, las matrices a considerar son , con .


![{\displaystyle [D(1,{\overset {r}{\dots }},1,0,\dots ,0)],\ r=1,\dots n}](https://wikimedia.org/api/rest_v1/media/math/render/svg/85ecac21fa531d147668818dacf70823d351d9db)

En el plano proyectivo complejo , por tanto, hay tres clases de cuádricas (cónicas) equivalentes a las de matrices según si . Para tiene ecuación equivalente a y se confunden la elipse, la parábola y la hipérbola y se denomina cuádrica no degenerada; para tiene ecuación equivalente a y determina dos rectas, y para tiene ecuación equivalente a y determina una sola recta (doble).

![{\displaystyle [D(1,1,1)],[D(1,1,0)],[D(1,0,0)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8fbd4c362b4ed247aa60032f97d2b584de95b140)







Clasificación de cuádricas en el espacio proyectivo complejo
Igual que en el caso anterior, en el espacio proyectivo complejo hay cuatro clases cuádricas equivalentes a las de matrices según si . Para se denomina no degenerada y se confunden todas las cuádricas que afínmente denominamos no degeneradas; para se denomina cono y se corresponde con los distintos conos y cilindros afines; para son un par de planos distintos que se cortan en una recta real, y para es un solo plano (doble).
![{\displaystyle [D(1,1,1,1)],[D(1,1,1,0)],[D(1,1,0,0)],[D(1,0,0,0)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/58c6206524dc66b1c279bbe8a12ff9264e815ea9)


Clasificación de cónicas en el plano proyectivo real
Por la clasificación de formas cuadráticas reales, todas son equivalentes a una y sólo una de matriz de la forma . Como las matrices de las cuádricas están determinadas salvo producto por escalar, podemos suponer que (multiplicando por -1). Identificamos cada clase con el par , en el que ( porque la forma cuadrática nula no define una cuádrica).





Por tanto, en el plano proyectivo real toda cuádrica (cónica) es equivalente a una y sólo una de las siguientes cinco (el par de la izquiera es ):

- : en alguna referencia. No degenerada imaginaria. No tiene ningún punto real.
- : en alguna referencia. No degenerada real. Aquí se confunden la elipse, la parábola y la hipérbola reales (surgen al tomar distintas rectas como la recta del infinito).
- : en alguna referencia. Dos rectas imaginarias y que se cortan en el punto real .
- : en alguna referencia. Dos rectas reales y .
- : en alguna referencia. Una sola recta (doble) real .







![{\displaystyle [0:0:1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/37b453b7ff45b2413212b5f3b6a657d75ff32be2)







Clasificación de cuádricas en el espacio proyectivo real
Igual que en el apartado anterior, toda cuádrica del espacio proyectivo real es equivalente a una de las siguientes ocho:
- : en alguna referencia. No degenerada imaginaria. No tiene ningún punto real.
- : en alguna referencia. No degenerada, no reglada (no contienen totalmente ninguna recta). Aquí se confunden el elipsoide, el hiperboloide de dos hojas y el paraboloide elíptico del espacio afín, que surgen al considerar distintos planos del infinito.
- : en alguna referencia. No degenerada, reglada (contiene totalmente alguna recta). Aquí se confunden el hiperboloide de una hoja y el paraboloide elíptico que, como antes, surgen al tomar distintos planos del infinito.
- : en alguna referencia. Cono imaginario. Tiene un punto real .
- : en alguna referencia. Cono real.
- : en alguna referencia. Dos planos imaginarios y que se cortan en la recta real .
- : en alguna referencia. Dos planos reales y .
- : en alguna referencia. Un solo plano (doble) real .






![{\displaystyle [0:0:0:1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/44411a0b3fc2ad9fb7808a1e81976be7f9527928)
![{\displaystyle [0:0:1:0]\vee [0:0:0:1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/19795d54c408db7e2f6b86453678e0ff42859aa5)
Véase también
Enlaces externos
- Cuádricas, en wmatem.eis.uva.es
- El contenido de este artículo incorpora material de una entrada de la Enciclopedia Libre Universal, publicada en español bajo la licencia Creative Commons Compartir-Igual 3.0.
Referencias
- Casas-Alvero, Eduardo (2014). Analytic Projective Geometry. European Mathematical Society. ISBN 978-3-03719-138-5.
| Control de autoridades |
|
|---|
 Datos: Q852117
Datos: Q852117










